One solution
for every need

Complete
workflow
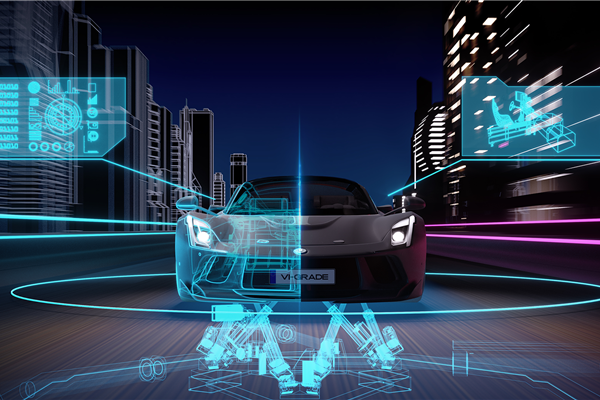
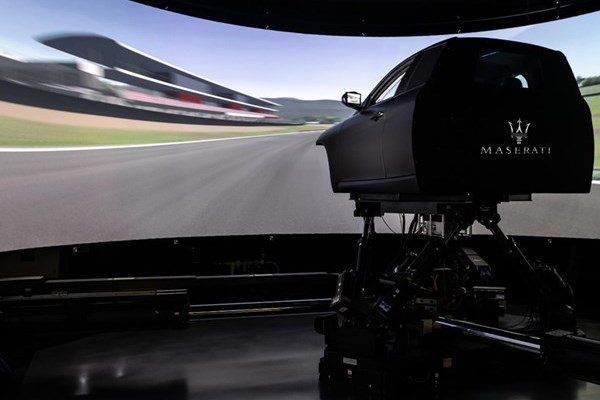
Our simulators allow adding real-world elements to the environment, making them the most complete engineering tools. Hardware-in-the-Loop components such as real ECUs, radars, and cameras for ADAS applications can be also added to the simulation scenario, resulting in infinite, high-correlation possibilities.

Unique
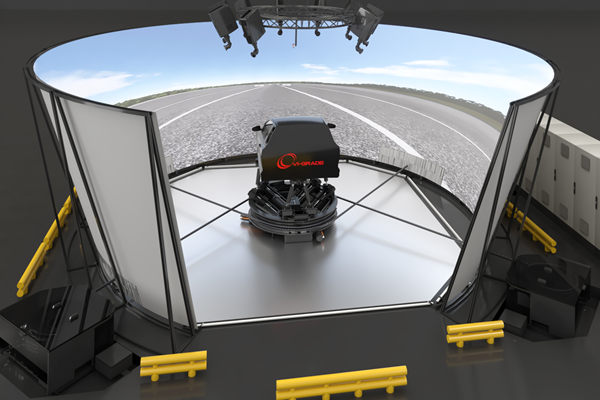
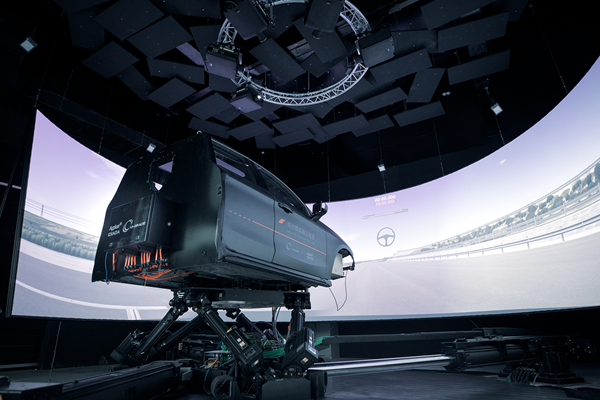
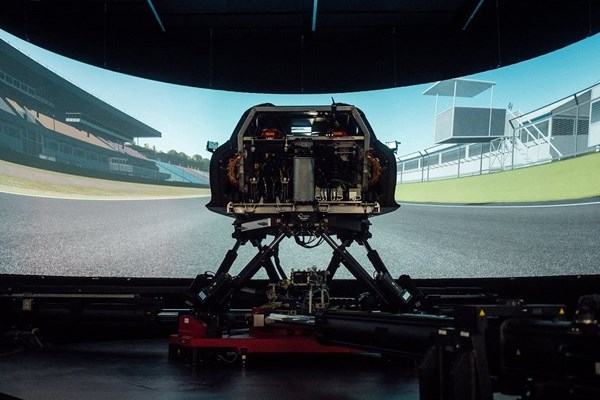
architecture
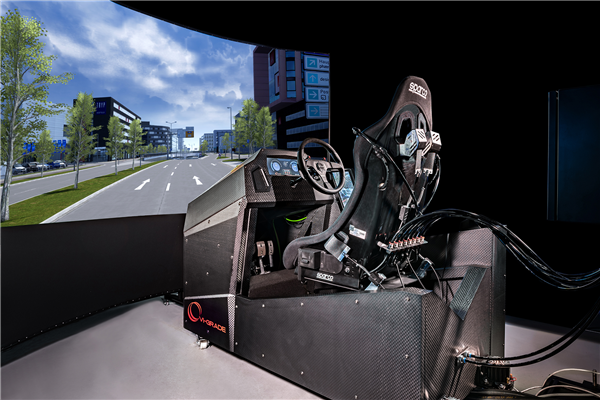
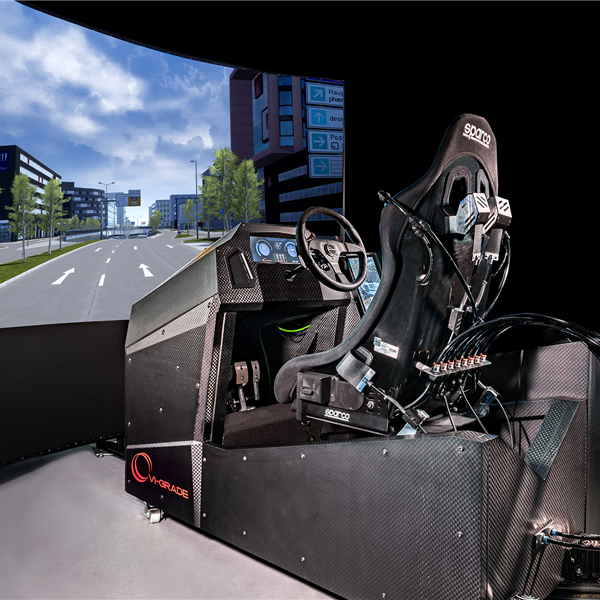
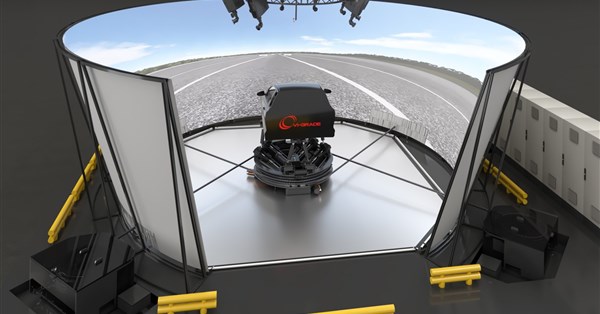
Our dynamic simulators are based on a patented concept. The lower part moves on air pads with 3 main actuators or cables, providing a realistic driving experience with redundant movements. The upper part allows for fast response and high frequency, making them particularly suitable for ride & comfort studies.

Open
environment
VI-grade provides a complete set of software packages for our driving simulators, including VI-CarRealTime, VI-WorldSim, and VI-MotionCueing. Through our VI-Certified program, we support interfaces with all major real-time vehicle models, advanced tire models, traffic simulation software, and Hardware-In-the-Loop platforms.