Electric Power Steering
Overview
Electric power steering systems (EPS) are nowadays becoming very popular and attractive for a wide range of vehicles. While in the past decade EPS type of steering system were targeted to small segment cars, today finding an EPS on a premium car, is becoming more and more frequent, placing it as a direct replacement for hydraulic actuated servo steering systems. Being the steering system a mean of communication between the vehicle and the driver, and the main line where the information of the state of the car and the road inputs streams into the driver perception, the design and testing of such components is playing an important role in the vehicle development process. The main criticisms moved to EPS systems were that they had a poor feel, were difficult to tune, and lacking in performance when compared to their hydraulic counterpart, but now, with the availability of more advanced systems, things are quickly changing. As a result, not only the hardware requirements but also functional ones, concerning performance of EPS, in conjunction with vehicle level of control and feeling, are increasing.
Challenge
Steering system main scope is to deliver the directional control in the movement of the vehicle accordingly to the driver input by converting the rotary movement of the steering wheel into a rotation of the front wheels about the steering axis. The main requirements it should fulfill are:
- Being accurate and easy to handle
- Requiring a minimum effort to be operated
- Providing directional stability to the vehicle
- Providing a proper feedback of the vehicle state and road conditions
- Isolating the driver from shocks coming from the road
- Including an energetically efficient servo system
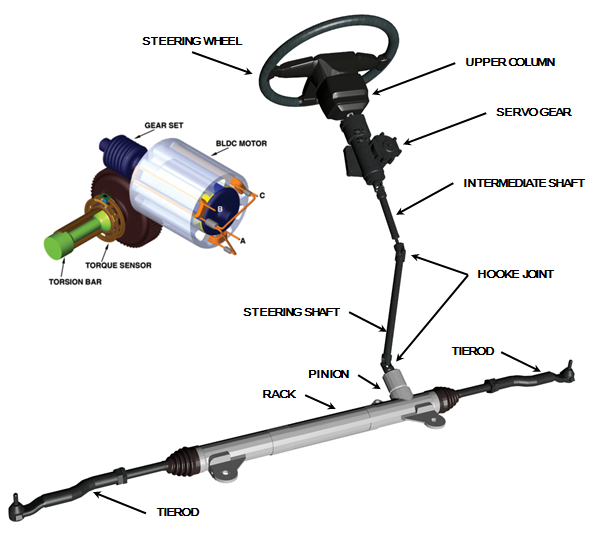
- Mechanical Design:
- Steering line and tie-rods geometry;
- Hook joints design;
- Steering wheel variable ratio.
- Controller design and functions:
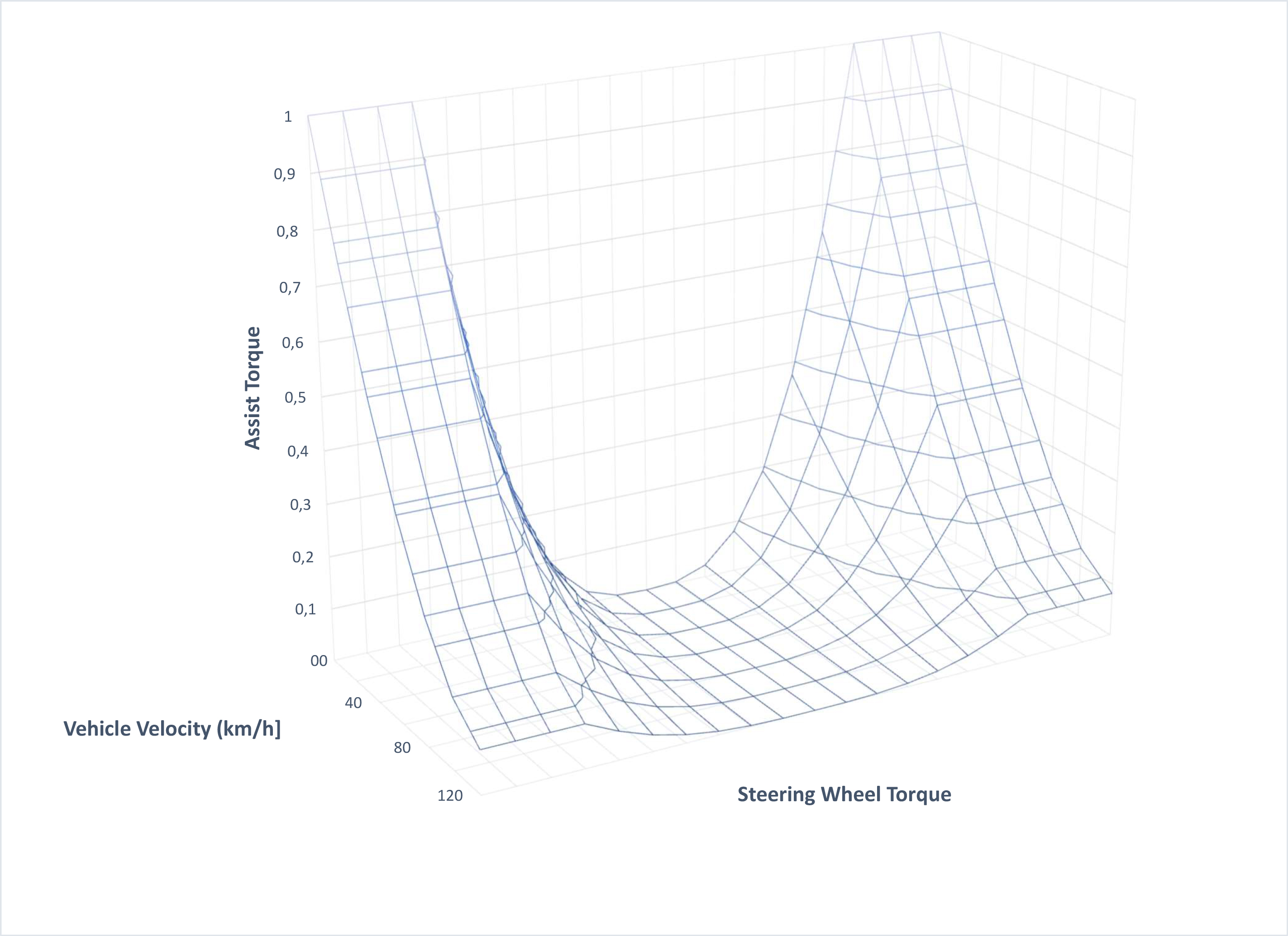
- Base assist;
- Active return;
- Friction compensation;
- Damping compensation;
- Pull-drift compensation.
- Functional tuning
Solution
The availability of a functional model of the steering system and of the EPS can be a very useful development tool in order to properly define the system specifications, design and tune controller parameters, optimize the steering system performance in a full vehicle virtual testing environment. Both objective and subjective evaluation metrics could be retrieved from such an environment.
VI-grade can provide the fulfillment of all the essential steps required in order to accomplish a deep integration between the steering system and the vehicle development process:- Accurate mechanical steering model: VI-CarRealTime supports both a conceptual and an advanced steering mechanical model based on the formulation of Prof. Pfeffer from Munich University of Applied Sciences, including full detail for mechanical components and friction elements;
- Integration of high fidelity vehicle model, capable of running on both offline and HIL systems;
- Integration of EPS ECU both in soft realtime environments (using the MATLAB Simulink and FMI interface) and in hardware in the loop systems (physical ECU + virtual steering model)
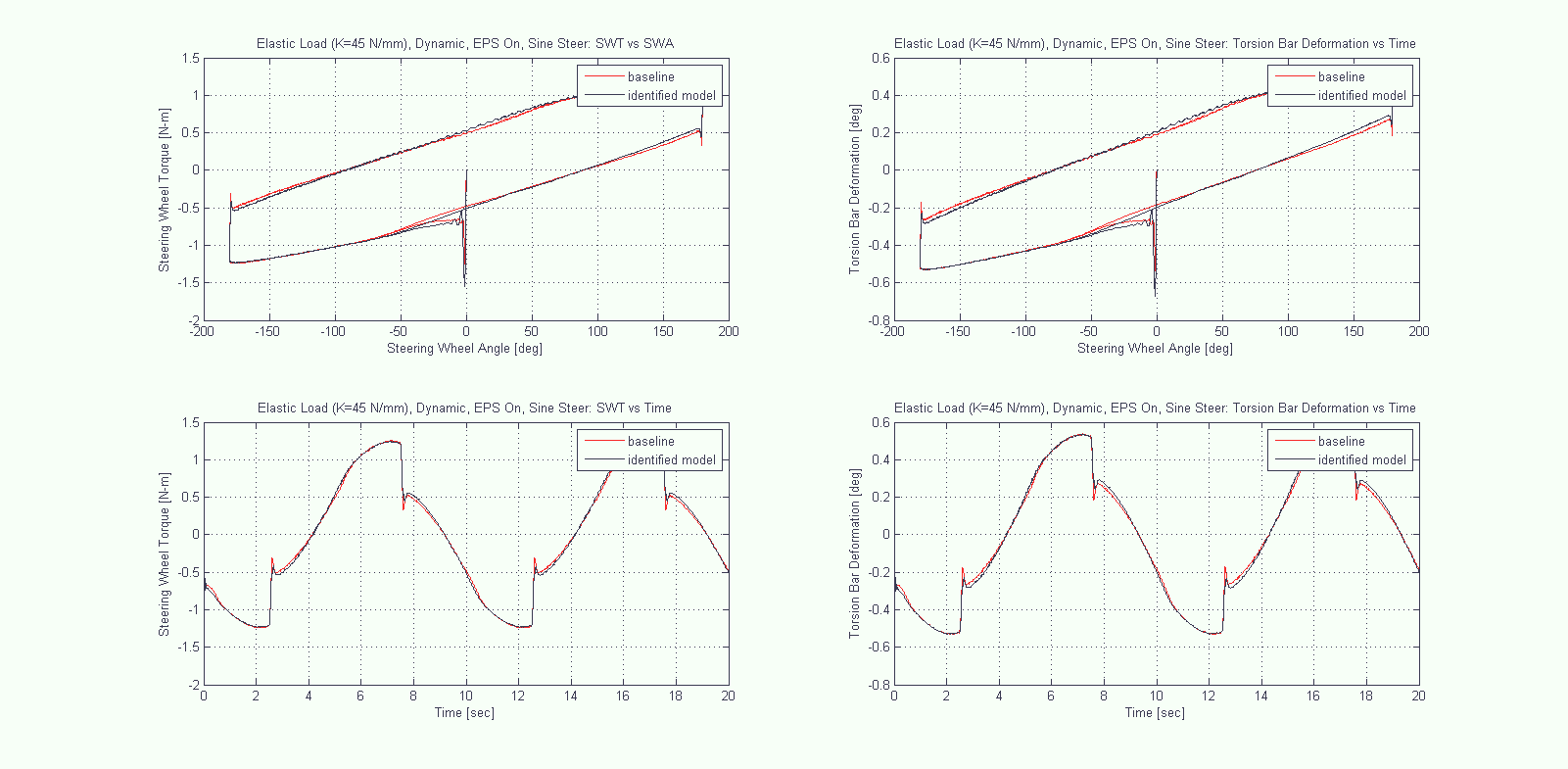
- Steering system parameter identification procedure capable of retrieving mechanical and base assist properties of the EPS from experimental tests conducted on the steering testrig, full vehicle, and other simulation models.
- Integration with high detail level tire models for usage in specific type of events such as parking cycles or comfort missions
- Automatic procedure for the definition of objective metrics in the steering system performance evaluation
- Subjective evaluation support in driving simulator environment
Driving simulator applications
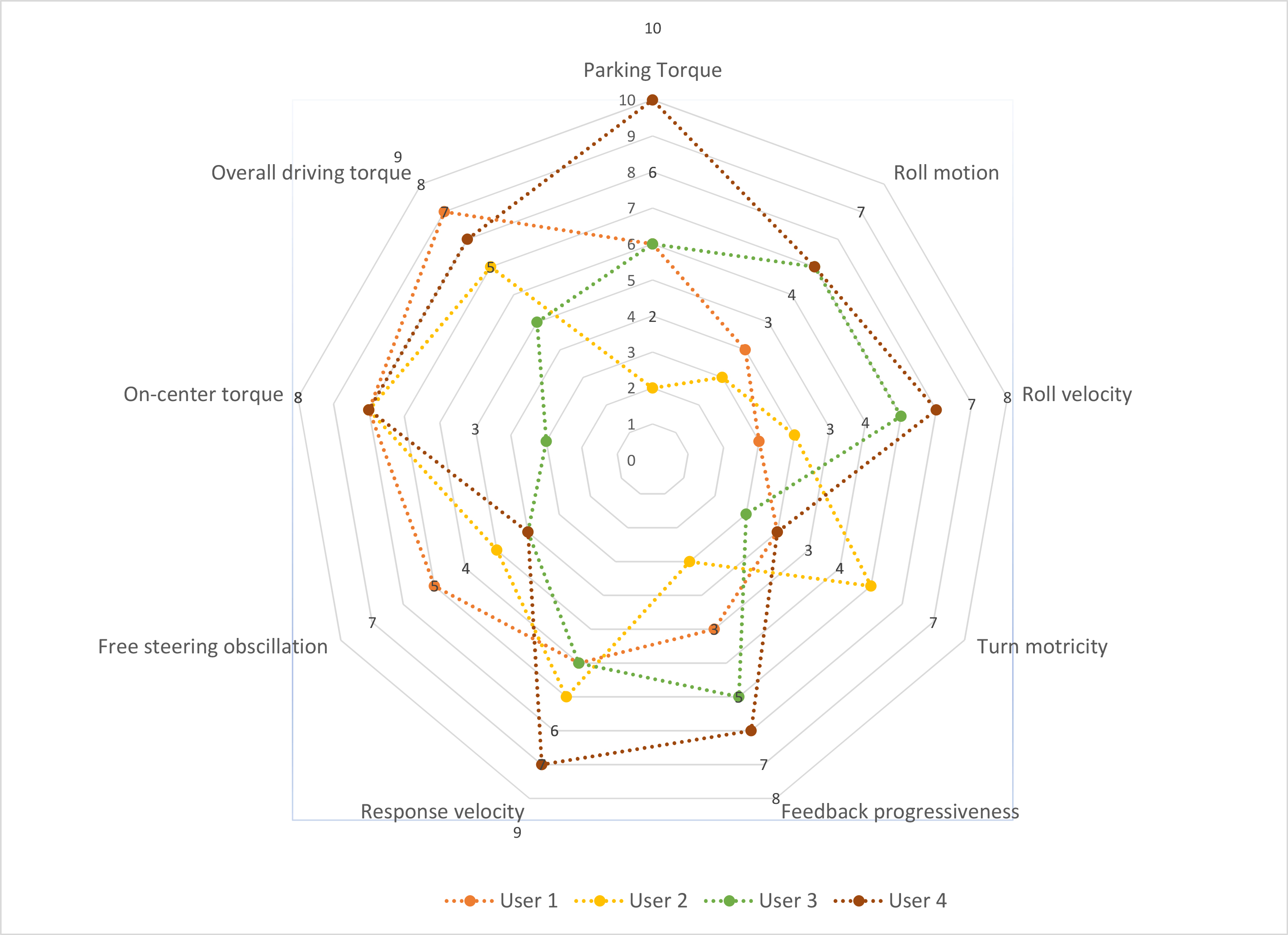
An advanced application of the functional steering model is its usage in conjunction with a driving simulator. In such scenario, the presence of a human driver can be exploited in its full potential by implementing a test panel combining objective and subjective metrics. Typical indexes to be assessed for a steering system are:
- Quickness of response
- Steering ratio feeling
- Rear axle delay
- Overall steering response
- Motricity in turn
- Roll motion
- On-center feeling
- Parking torque
- …
INTERESTED?
If you wish to learn more about our Electric Power Steering modeling solutions, please fill out the form below.